A team of engineers has sent a rover to explore a distant extra-terrestrial landscape. The rover has landed safely on the planet’s surface, but, shortly after, a key controller fails and the throttle is now jammed at max. How can the rover still complete its mission on this unknown alien terrain?
This is the scenario facing second-year mechanical engineering students in the first of two design competitions this semester. The student teams must design their Remotely Operated Vehicle for Exploration and Reconnaissance (ROVER) so it can still slow down, stop, and safely traverse a variety of surfaces. Designing system redundancies is a key element of actual planetary exploration (NASA’s current Mars Rover, Curiosity, recently faced a software issue that left it temporarily frozen), as well as sound engineering practice.

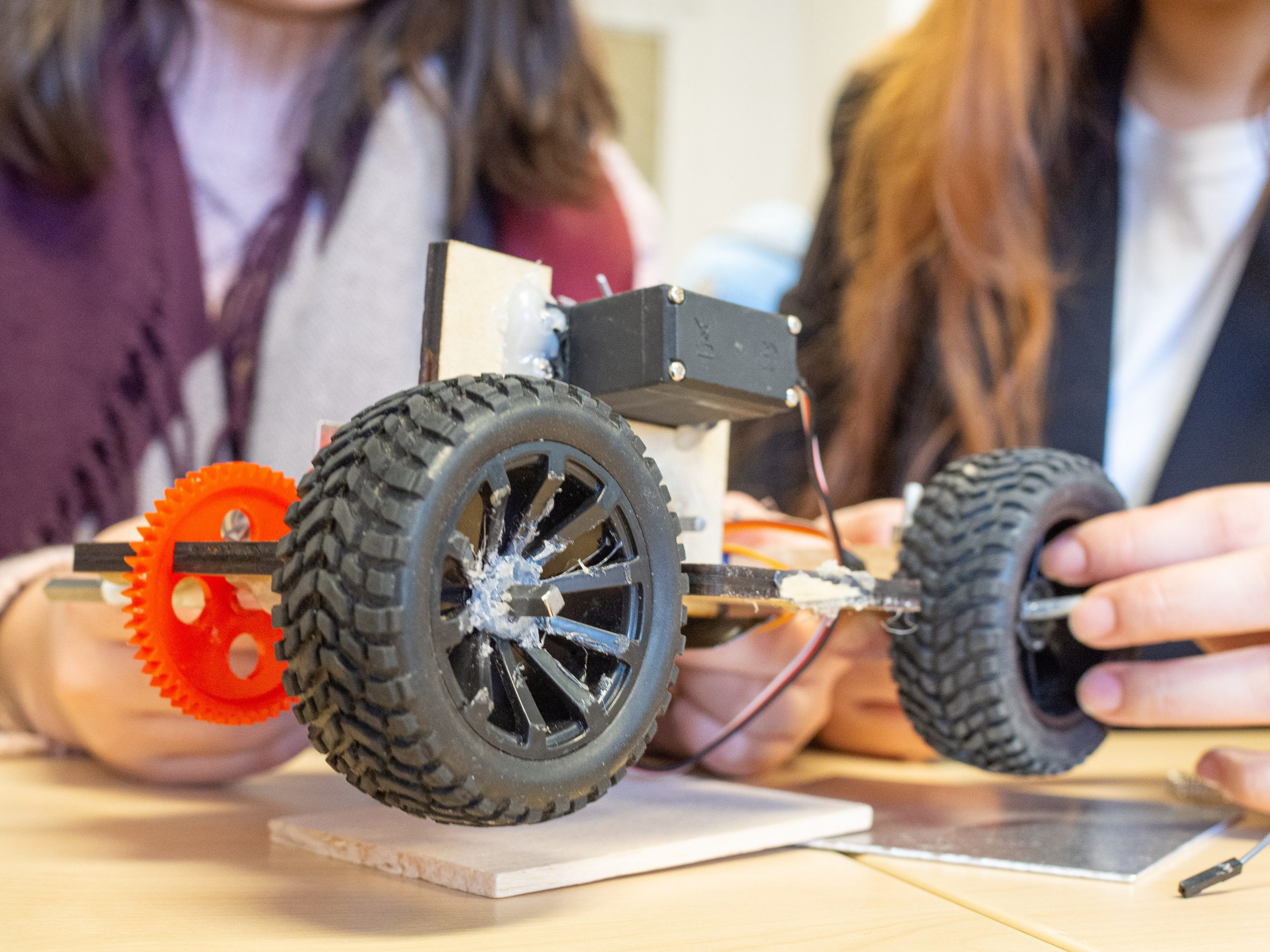

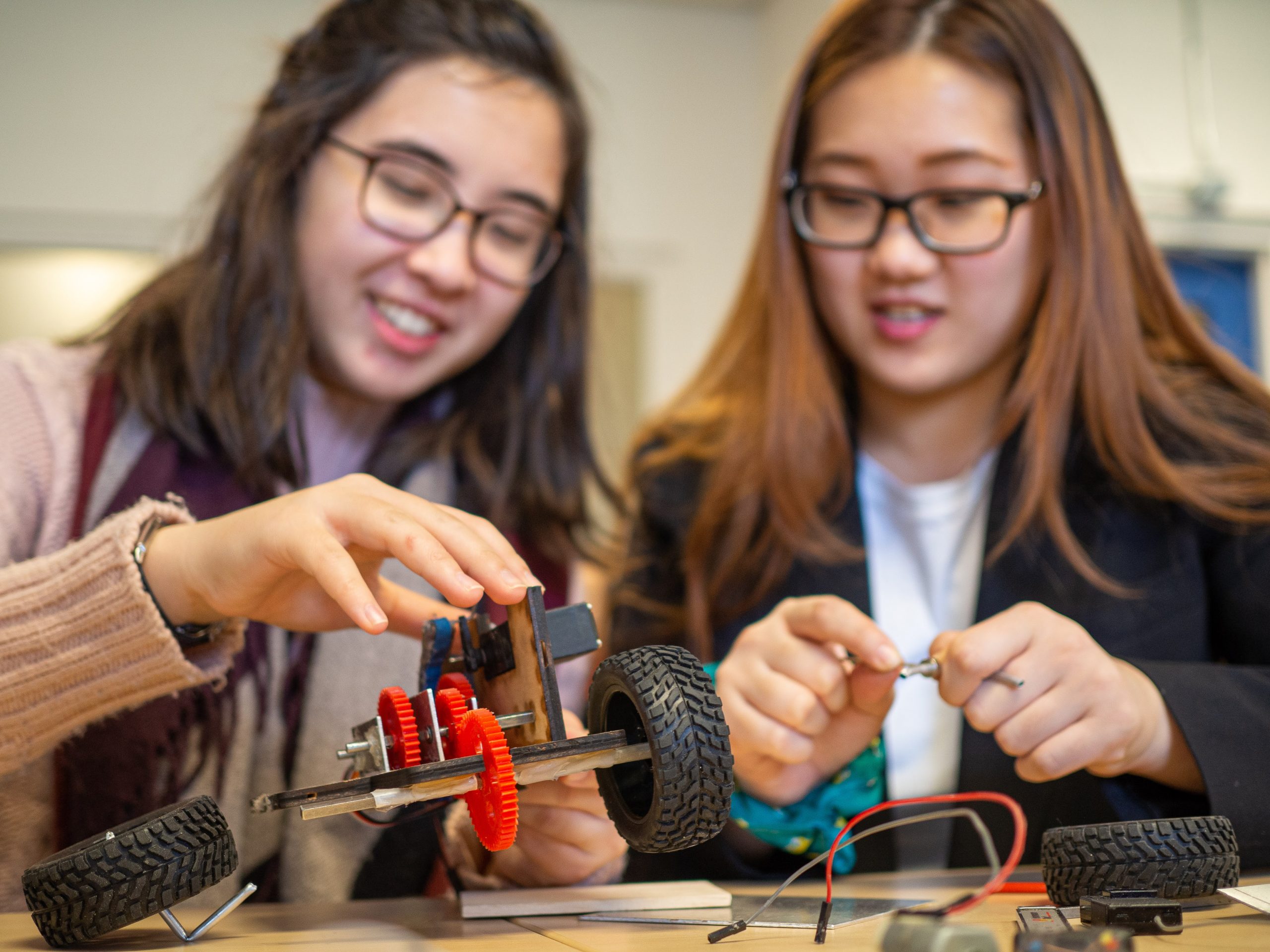
The student teams will face-off in five rounds, with their ROVERs challenged by obstacles, hills, chasms, rough-terrain, sand traps, and sudden stops on a track they’ve never seen until competition day. Their final test will be the Mayhem Round, where all five teams will take the track at once, competing for speed and distance in a long jump. As their first chance to merge their academic knowledge with practical design, this competition will challenge students to put everything they’ve learned this year into execution.
This event is open to the public. Come vote on your favourite design!
Photo Credit: Clare Kiernan