 Robotics specialist Dr. Kefei Wen is joining the Department of Mechanical Engineering’s faculty team as an Assistant Professor. Coming to UBC from a postdoctoral fellowship at the Continuum Robotics Laboratory at the University of Toronto, Dr. Wen’s research focuses on physical interaction between humans and robots, specifically parallel robots, and his research interests also include kinematics, dynamics, and control of complex robotic systems.
Robotics specialist Dr. Kefei Wen is joining the Department of Mechanical Engineering’s faculty team as an Assistant Professor. Coming to UBC from a postdoctoral fellowship at the Continuum Robotics Laboratory at the University of Toronto, Dr. Wen’s research focuses on physical interaction between humans and robots, specifically parallel robots, and his research interests also include kinematics, dynamics, and control of complex robotic systems.
Parallel robotics are frequently used in manufacturing, where multiple jointed parallel legs attached to the ground are used to tilt a platform. During his Ph.D. studies at Université Laval, Dr. Wen developed a methodology for synthesizing novel kinematically redundant parallel manipulators, robotic systems which are human-friendly, singularity-free, and have outstanding rotational capabilities, making them suitable for physical human-robot interaction.
His work at the University of Toronto involved unifying the modelling approaches of both rigid parallel robots and tendon-driven parallel continuum robots. In 2020 he was recognized with an ASME Journal of Mechanisms and Robotics Reviewers of the Year Award, and in 2021 a paper he co-authored was selected for Honorable Mention by IEEE Transactions on Robotics.
Dr. Wen will join our Manufacturing Automation and Robotics research area, and is starting a new research group, the Advanced Robotics Laboratory. He joins our teaching team in Term 2 of 2022W as an instructor for Computer Control of Mechatronics Systems. We are pleased to welcome Dr. Wen to the Department of Mechanical Engineering and the UBC community!
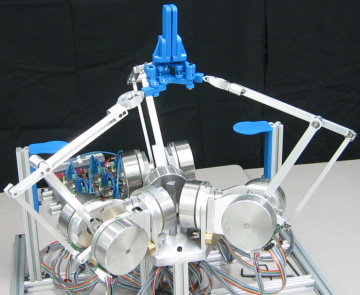
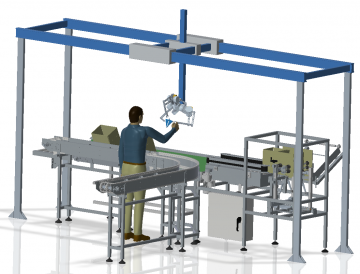
The first image is a prototype of a novel kinematically redundant parallel manipulator. The second image shows how such a system could be used for human-robot interaction.